The dominant family of generative models today is the denoising diffusion probability models (DDPMs) due to its great capability of generating high-quality, fidelity-preserved images/videos. It's a generalization of variational auto-encoders (VAEs) that extends from one-step generation to multiple steps, mapping from a random probability space (usually Gaussian) to the data distribution space in a denoising manner. This blog post introduces the basics of VAEs and DDPMs and provides a simple application of generative models.
Preliminary: Variational Auto-Encoders (VAEs)
What do we want for generative models?
The ultimate goal of generative models is to model the real data
distribution
Unfortunately, it's still impractical to model the observed data
distribution
The generative models are purposed for modeling the observed data
distribution
Introduction to Auto-Encoders
Before we dive deep into VAEs, we first introduce what auto-encoders
(AEs) are. AEs are a kind of models that first encode the given
input
However, as you may already notice, the problem is, how can we sample
latents
Another problem with AEs is, it's hard to measure the
quality of the latent space. Presumably, if two data samples
To put the auto-encoding process more formally, we denote the
parameterized encoder and decoder respectively as
To train the auto-encoder, an
For simple forms of
There are many variants of AEs to help learn a better latent space, and some works even quantize the latent space to get a finite set of latent variables. We will introduce these variants in future posts.
Understanding Variational Auto-Encoders
What is the distribution of the latent space?
As mentioned in the previous section, the biggest problem with AEs is that we cannot sample a latent in the latent space because we have no ideas what its distribution is. What if we can constrain, or enforce the latent distribution to be a simple well-known distribution, such as Gaussian distribution? Since we know the distribution, we can draw samples from this distribution and use the decode to generate the data sample.
Here come to us two remaining questions: - How can we constrain the latent distribution to be, like a Gaussian distribution? - How can we map our input data sample to this distribution, and teach the decoder to generate new data samples from this distribution?
Remember how we teach our AEs to learn decoding from
The second loss, which we call reconstruction loss is
unchanged as we want our AEs to learn to reconstruct the input sample.
The new loss
If both
To eliminate the second term, we notice that:
To eliminate the third term, we have:
Combining all three terms, we have:
When
It's a very nice simple closed form if we want to minimize the
distance between the distribution of
This is the so-called reparameterization trick, a technique that allows for efficient computation of gradients by sampling variables from a known distribution. More importanty in our case, it opens up the door for us to illuminate an explicit Gaussian distribution rather than an unknonwn distribution implicitly defined by the auto-encoder. This allows us to compute the KL divergence in a very simple way.
Combining all together, we have our final loss:
Theoretical derivation of VAEs
You may ask why this can or cannot work? Is the training objective really effective to push the latent distribution to a Gaussian and can we really sample a latent and generate a faithful new data point? So, we need to understand why this works under the hood, through a theorectical perspective.
Recall that our ultimate goal is to estimate the real data
probability
In fact, the log probability can be rewritten as:
where
We can slightly rewrite the first term:
The parameter
VAEs for Anime Face Generation
To demonstrate how VAEs work, let's use VAEs to generate anime faces, with data provided in this repository. You can use this piece of code. Don't forget to install the required packages.
However, training VAEs is not a trivial thing. As shown in the following figures, the generated images are quite blurry, missing details and lacking diversity.
You can try yourself with the provided code, tune the loss weight for KL divergence. This may add some diversity but still, the generated images suffer from intensive blurs.
Understanding Denoising Diffusion Probability Models (DDPMs)
What is DDPMs
It seems quite simple for VAEs to learn to generate new data samples from a known distribution like Gaussians, but that's not trivial in fact. Imagine you have a high-dimensional dataset like real-world images that are characterized with bunches of features, and in this case, it's hard to model a perfect mapping from a standard Gaussian distribution to the real data distribution because the latter is very complex and the model is challenged to reconstruct the distribution space.
Diffusion models take a clever idea: generating a
data sample from a single latent is hard, why not do it in
multiple steps? That is, we first sample from a Gaussian
distribution, and then decode it into a distribution that is close to
Gaussian, and then decode this latent again, until the final decoded
variable matches the real data distribution. Samping from a sequence of
steps is much simpler compared to directly sampling from the Gaussian
and decoding it into a real data sample in one step. To put it more
simply, our latent
Forward diffusion process
Given a data point
Here
From the above equation, we have the full forward diffusion process:
starting with a clean input
We can represent
Backward denoising process
What we're really interested in is the reverse
process: how to get
Now
What is the loss function? Recall that in the VAE section, we have
derived the following lower bound:
If we regard
We can then decompose the lower bound into:
Maximizing the ELBO is equivalent maximing the reconstruction loss
and minimizing
Recall that the KL divergence bwtween two Gaussians
In our case,
The "ground-truth" mean as derived above is
Discarding the coefficient, we have the final loss function for time
step
That is, during training we randomly sample a time step
As for
Choice of
The remaining question is how to choose the scheduler
Recall that the noise is injected through
with
This scheduler has an effect of a linear drop-off in the middle of
the process and a more flat change near the extremes of
Classifier Guided Diffusion and Classifier-Free Guidance (CFG)
Classifier guided diffusion
In real-world applications, we usually want to control generation
conditioning on some inputs, denoted by
by incorporating the reparameterization trick
Now we'd like to estimate the derivative of the joint probability of
Thus,
Classifier-free guidance
It's cumbersome to leverage an extra classifier to guide the diffusion process. Fortunately, by slightly re-write the score function, we can bypass the need of an additional classifier model:
Diffusion Models for Anime Face Generation
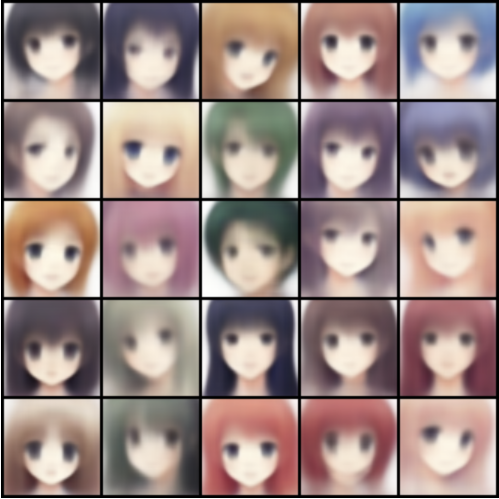
Now, let's train diffusion models on the same anime face dataset. We use a simple U-Net as the model backbone and leverage the diffusers library to schedule noise. You can download the code here.
Training diffusion models takes much longer than VAEs before obtaining satisfactory results. You'll observe loss convergence soon after training but it does not mean the generated images are good enough. Instead, As training proceeds, the results are getting better. Here are some results after training for two epochs on my laptop. If you will, you can train the model longer for higher-quality images.


Conclusion
In this post, we revisited the basic concepts and principles of auto-encoders, variational auto-encoders and diffusion models, and how they evolved through time. Diffusion models are not designed to replace auto-encoders or VAEs, instead, they can be used in conjunction, such as the latent diffusion models (LDMs) for a trade-off between compression and performance. More specifically, VAEs are good at preserving high-level compositions whereas diffusion models capture more fine-grained details. It's possible to combine the best of both worlds through LDMs. There are some applications of diffusion models on computer games such as scene generation, 3D model generation, UV generation, etc. There is huge potential for such models to sparkle in the near future.