图形学中有关旋转的一个问题是,一个(三维空间的)向量绕一个任意轴旋转若干角度后的角度是什么。本文简单进行推导,给出显式结果。
方法一:向量分解
推导过程
首先介绍一个最容易理解的方法——向量分解。假设要旋转的向量是
现在我们把
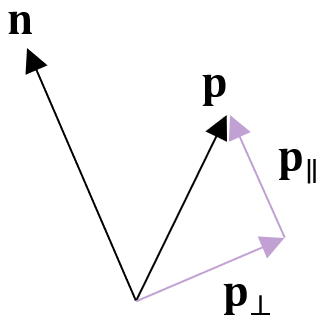
根据已知的旋转轴
其中一个基向量我们已经找到了,就是
搞定!
矩阵形式
我们知道向量的叉乘可以表示为:
所以,使用Rodrigues'旋转公式,只需要首先令
方法二:坐标轴对齐
既然直接绕着任意轴旋转比较困难,那为啥不先进行整个空间的旋转,把旋转轴旋转为坐标轴,这样就能把向量绕任意轴旋转转化为向量绕标准坐标轴旋转。这就是我们非常熟悉的问题了。
假定我们考虑的是三维空间的旋转(对更高维的情况容易推论),即标准坐标系为
首先,我们构建一个坐标系
现在,我们要把坐标轴
很容易验证:
现在,原来的向量
检验
现在我们用代码来检验一下上述三种方法是否能得到同样的结果,以及它们的运算效率如何。比较的方法包括: 1. 向量分解-向量形式 2. 向量分解-矩阵形式 3. 对标轴对齐
程序在虚拟机上运行,RAM为4G,硬盘20G,处理器为2个Intel Core i5-10400F CPU @ 2.90GHz。
代码如下: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
using namespace std;
const double PI = 3.1415926;
// rotation using vector decomposation - the vector form
void DecomposeVector(const Eigen::Vector3f &n, const Eigen::Vector3f &p, float angle) {
double rotationAngle = angle / 180.0 * PI;
auto startTime = std::chrono::high_resolution_clock::now();
Eigen::Vector3f rotatedVector = cos(rotationAngle) * p
+ (1 - cos(rotationAngle)) * (n.dot(p)) * n
+ sin(rotationAngle) * (n.cross(p));
auto endTime = std::chrono::high_resolution_clock::now();
double deltaTime = std::chrono::duration<double, std::milli>(endTime-startTime).count();
cout << "Method: vector decomposition - the vector form. The rotated vector p' is ("
<< rotatedVector(0) << "," << rotatedVector(1) << "," << rotatedVector(2)
<< "). The time used is " << deltaTime << endl;
}
// rotation using vector decomposation - the matrix form
void DecomposeMatrix(const Eigen::Vector3f &n, const Eigen::Vector3f &p, float angle) {
double rotationAngle = angle / 180.0 * PI;
auto startTime = std::chrono::high_resolution_clock::now();
Eigen::Matrix3f N = Eigen::Matrix3f::Identity();
N << 0, -n(2), n(1),
n(2), 0, -n(0),
-n(1), n(0), 0;
Eigen::Matrix3f R = Eigen::Matrix3f::Identity() + sin(rotationAngle) * N + (1 - cos(rotationAngle)) * N * N;
Eigen::Vector3f rotatedVector = R * p;
auto endTime = std::chrono::high_resolution_clock::now();
double deltaTime = std::chrono::duration<double, std::milli>(endTime-startTime).count();
cout << "Method: vector decomposition - the matrix form. The rotated vector p' is ("
<< rotatedVector(0) << "," << rotatedVector(1) << "," << rotatedVector(2)
<< "). The time used is " << deltaTime << endl;
}
// rotation using axis coordination
void AxisCoordination(const Eigen::Vector3f &n, const Eigen::Vector3f &p, float angle) {
double rotationAngle = angle / 180.0 * PI;
auto startTime = std::chrono::high_resolution_clock::now();
Eigen::Vector3f crossed = n.cross(p);
Eigen::Vector3f u = n;
Eigen::Vector3f v = crossed / crossed.norm();
Eigen::Vector3f w = n.cross(v);
Eigen::Matrix3f Q = Eigen::Matrix3f::Identity(), T = Eigen::Matrix3f::Identity();
Q.row(0) = u;
Q.row(1) = v;
Q.row(2) = w;
T << 1, 0, 0,
0, cos(rotationAngle), -sin(rotationAngle),
0, sin(rotationAngle), cos(rotationAngle);
Eigen::Vector3f rotatedVector = Q.transpose() * T * Q * p;
auto endTime = std::chrono::high_resolution_clock::now();
double deltaTime = std::chrono::duration<double, std::milli>(endTime-startTime).count();
cout << "Method: axis coordination. The rotated vector p' is ("
<< rotatedVector(0) << "," << rotatedVector(1) << "," << rotatedVector(2)
<< "). The time used is " << deltaTime << endl;
}
// main
int main()
{
float angle = 60;
Eigen::Vector3f p(1.0, 2.0, 3.0);
Eigen::Vector3f n(2.0, 8.6, -3.1);
n.normalize();
// execute functions
cout << "The vector p is (" << p(0) << "," << p(1) << "," << p(2) << "). "
<< "The rotation axis n is (" << n(0) << "," << n(1) << "," << n(2) << "). " << endl;
DecomposeVector(n, p, angle);
DecomposeMatrix(n, p, angle);
AxisCoordination(n, p, angle);
return 0;
}1
2
3
4The vector p is (1,2,3). The rotation axis n is (0.213724,0.919011,-0.331271).
Method: vector decomposition - the vector form. The rotated vector p' is (3.57449,0.643966,0.899062). The time used is 0.016354
Method: vector decomposition - the matrix form. The rotated vector p' is (3.57449,0.643966,0.899062). The time used is 0.016642
Method: axis coordination. The rotated vector p' is (3.57449,0.643966,0.899062). The time used is 0.0210621
2
3
4The vector p is (1,-654.1,12.88). The rotation axis n is (0.995044,0.0136933,-0.0984901).
Method: vector decomposition - the vector form. The rotated vector p' is (-59.7309,-338.298,-556.777). The time used is 0.015503
Method: vector decomposition - the matrix form. The rotated vector p' is (-59.7309,-338.298,-556.777). The time used is 0.015297
Method: axis coordination. The rotated vector p' is (-59.7309,-338.298,-556.777). The time used is 0.021547
1 | The vector p is (32.5,45.1,-2.2). The rotation axis n is (0.57735,0.57735,0.57735). |
1 | The vector p is (666,0,0). The rotation axis n is (0,0,1). |
最后一组出现了精度问题,所以代码中还应该加入判断 1
2if(abs(value - round(value)) < epsilon)
value = round(value);
从上面的例子来看,向量分解-向量形式与向量分解-矩阵形式运行效率是一致的,而坐标轴对齐的效率较低,这主要是由计算三次矩阵乘法导致的。