If you are familiar with Cinemachine. you probably know there is a
knotty problem with Cinemachine' damping if you are using
Framing Transposer or some other components to track a
follow point. That is, the camera jitters with damping enabled under
unstable frame rate. The more unstable frame rate is, the more heavily
camera will jitter. This post will discuss this phenomenon and proposes
a workaround to solve this issue.
Camera jitters with
damping in Cinemachine
Unity's Cinemachine has a notoriously severe problem that may cause
the follow object to seemingly jitter when you are using the
Framing Transposer component with damping enabled.
To show this, I did a simple experiment. I created a new blank scene
and spawned a new attached with the following script:
if (elapsedTime >= 5.0f) { if (currentSpeed > 0.0f) { currentSpeed = 0.0f; } else { currentSpeed = speed; }
elapsedTime = 0.0f; }
transform.position += new Vector3(1, 0, 0) * currentSpeed * Time.deltaTime;
} }
This script moves the cube for 5 seconds and then keeps it steady for
another 5 seconds and continues moving. The move speed as
well as the fps (frames per second) can be set for test
under different conditions.
A new virtual camera is then created with a
Framing Transposer component following this cube. A default
damping of 0.2 is used.
Here is result with speed is 100 and fps is
0 (when set to 0, the real fps is determined by Unity, may but
unstable).
The jitters are very clear. You can also notice that the frame rate
(presented in the Statistics panel) is very unstable, and we will know
soon it is the unstable fps that results in camera jitters.
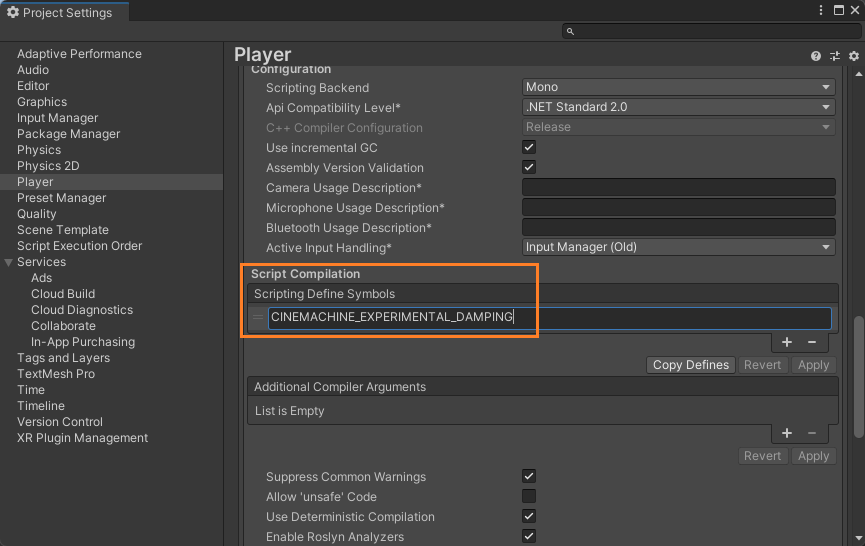
Cinemachine proposes a workaround to alleviate this problem, that is,
to use the revised version of damping where they sub-divide each frame
and simulates damping in the consecutive series of sub-frames. To enable
this functionality, go to Edit -> Project Settings -> Player ->
Script Compilation and add the
CINEMACHINE_EXPERIMENTAL_DAMPING marco to it.
OKay, now we have enabled the new damping algorithm and let's see how
it will mitigate the jittering issue. Here is result with the same
setting we used in our previous experiment, i.e., speed is
100 and fps is 0.
It is astonishing to see the jittering issue becomes even more
severe. I conjecture that the variance of fps will significantly amplify
camera jitters when this feature is enabled. In other words, the
experimental damping algorithm responds to the variance of fps in a
NON-linear way: when the variance is small, the experiment damping will
reduce the gaps of camera location between contiguous frames; but when
the variance is large, it will enlarge the gaps, leading to unacceptable
jittering. (Note: I did not validate this conjecture. If you are
interested, just review the code and test it yourself.)
What about the expected result if fps is stable? Let's take more
experiments!
Here is result with speed is 100 and fps is
120 (very high fps, which is usually prohibitive in shipped games).
Very steady camera! What about setting fps to 60? Here
is the result.
An fps of 60 performs equally well with 120, which is anticipated as
fps is stable. Okay, let's try a final experiment where fps is set at an
extreme value of 20.
Even a low fps of 20 makes our camera stable, only if fps itself is
stable.
Now we can conclude that it is the instability of fps that induces
camera jitters, regardless of the exact value of fps. But, why?
Why camera jitters
Before answering this question, let us first take a look at the
source of damping implemented in Cinemachine.
#if CINEMACHINE_EXPERIMENTAL_DAMPING // Try to reduce damage caused by frametime variability float step = Time.fixedDeltaTime; if (deltaTime != step) step /= 5; int numSteps = Mathf.FloorToInt(deltaTime / step); float vel = initial * step / deltaTime; float decayConstant = Mathf.Exp(-k * step); float r = 0; for (int i = 0; i < numSteps; ++i) r = (r + vel) * decayConstant; float d = deltaTime - (step * numSteps); if (d > Epsilon) r = Mathf.Lerp(r, (r + vel) * decayConstant, d / step); return initial - r; #else return initial * (1 - Mathf.Exp(-k * deltaTime)); #endif }
Translating into mathematics, we have:
where is the damp time
parameter and the elapsed
time in this frame. This equation decays the input , the distance for the
camera to go to the desired position, by an exponential factor . If , the residual will be , meaning that at
this frame, the camera will traverse 99% of the desired distance to go,
only remaining 1% amount for future frames.
OK, let's assume we've placed a cube in the origin and it moves along
the x-axis at a fixed speed, say,
m/s. A camera is placed to track the cube with damping where damp time
. Let's further denote the
delta time for each frame by , where is the -th
frame.
Having all variables fully prepared, we can then simulate the object
movement and camera track process.
In the beginning of 0-th frame, the camera and the cube are both at
the origin, i.e., (0, 0, 0). As the cube only moves along x-axis, we can
emit the y and z dimensions and use a one-dimensional coordiante to
represent cube and camera positions.
At the 1-th frame, the cube moves to , the
distance the camera traverses is , and the residual is . We set for simplicity.
At the 2-th frame, the cube moves to , the distance the camera traverses is
, and the residual is .
At the k-th frame, we have ,
, and
.
Without loss of generality, we can set . The following sections will use this
settings unless otherwise stated.
For different combinations of , may have different results. Let's dive into and see how it influences
the results.
Case 1: Stable FPS,
all are equal
When all are
equal, say , our equations
reduce to:
apparently has a
limitation of when
since . This
explains why a camera with damping always has a maximum distance to its
following target. There maximum distance, also the supremum, is exactly
. When is larger, will be larger, implying the
maximum distance between the camera and its following target will be
larger.
What if is
mutable? In this case, we can assume there exists an upper bound such that all satisty . Then we are
able to derive the same conclusion.
Another question is, why camera does not jitter when FPS is stable?
We turn to examine the sign of :
Therefore, when FPS is stable, is always larger than , and jitter will never
happen.
Case 2: Unstable FPS, vary
When FPS is unstable, where may mutate, how will the camera move in response to its
following target? We can still examine the sign of , but in another
way:
This equation uncovers why camera jitters happen with unstable FPS.
The residual at the k-th frame is essentially an interpolation
between the following target's current position increment and the last frame's
negative residual , where
the interpolation strength is the decaying factor .
As both and are fixed, a change in will incline the resulting
residual to different ends,
either or .
In our simplified case in which the target moves at a fixed speed in
the direction of x-axis, will always be positive (though its magnitude can vary) and
will always be negative.
A mutating thus has
a chance to alter the sign of , which further brings
about camera jitters.
So when will camera jitter? From the above equation, we know that
camera will jitter when the sign of consistently changes
over time, i.e., the value of oscillates around zero.
Let's make it equal to zero and see what we can find then.
This equation tells us when is near , camera will have a large chance to jitter. This
motivates us to improve damping by filtering out the occasions where
is very close to
.
What about going deeper? We can treat as variable, and all other
as constants. This abstraction gives us a function of :
Taking the derivative of ,
we know that is monotonically
decreasing when and monotonically increasing when , and . Hence, to make the sign of mutable, must be positive and the
minimum of must be
negative.
The minimum of can be
easily computed:
The last inequality holds because .
This reveals the fact that: when , a variant is likely to cause to change its sign,
thus resulting in camera jitters. Suppose is large enough, so then
the k-th residual gets
smaller than while is positive. A smaller pushes to become smaller for the next frame,
which further pushes the root of the function to become larger. In this
case, even with the same delta time, will have a larger chance wo
fall in the negative area, i.e., is more likely to be less than the root.
Solutions
Solution 1: imposing an
invalid range
Based on what we've discussed so far, we can immediately come up with
a simple solution: enforce to be if they are very close. That is to say, we use a
small value , if , we just set to .
Note that can be zero or negative. If this is the case, we keep the
original without
doing anything. Besides, you should be aware that here is not the time this
frame actually takes, instead, it is just the duration used to calculate
damping.
Let us explain it more quantitatively. Suppose ,
where .
Then according to our algorithm. We then
plug into the original
expression of :
This demonstrates that now the camera lags behind its following
target more than the previous frame since the residual is larger. After
substituting
with , would be zero, meaning
that the camera now keeps the same frame as last frame. Camera does not
jitter.
Here comes the question: what if the following target slows down, or
stops, or even turns back to the opposite direction and the camera still
remains the same residual to it?
It is quite a good question. But if we look carefully at the function
of , we will find this
situation will never happen. Let's rewrite here:
This time, we do not constrain the value of , but at last frame, it's positive.
When gets smaller but still
positive, we observe the function gradually shifts leftwards, pushing
the root towards zero. This implies that the area gets
contracted and the probability of remaining the same residual gets
smaller.
When is zero where the
following target stops, the current residual can be readily calculated
as , which closes the distance gap between the camera
of the following target. The ratio, which is calculated as , would be
devided by zero, outputting an infinite value.
When is negative, will be negative. The
ratio
now becomes negative, also beyond the range of .
We can implement this algorithm in less than 100 lines of code. You
should modify three files in the official Cinemachine source code
directory.
First is Predictor.cs. Add a ImprovedDamp
function:
The input bonus is . Parameter tolerance is what you should set
as we've introduced
above.
In file CinemachineVirtualCameraBase.cs, add a new
function ImprovedDetachedFollowTargetDamp:
1 2 3 4 5 6 7 8 9 10 11 12 13 14
public Vector3 ImprovedDetachedFollowTargetDamp(Vector3 initial, Vector3 dampTime, float deltaTime) { GameObject go = GameObject.Find("Cube"); // Hard find our following target of interest, you should not do like this! Vector3 deltaDistance = new Vector3(100, 0, 0) * deltaTime; // Hard set the velocity, you should not do like this! Vector3 residual = initial - deltaDistance; Vector3 bonus = new Vector3(residual.x / (residual.x + deltaDistance.x + 1e-7f), residual.y / (residual.y + deltaDistance.y + 1e-7f), residual.z / (residual.z + deltaDistance.z + 1e-7f));
This piece of code is very informal, and you should never write your
code like this. The purpose of this function is to get and . I reckon the correct
way to do this is to create a new (or two) variable in the
CinemachineVirtualCameraBase class and update it in each
tick. The code presented here is only for demonstration.
In file CinemachineFramingTransposer.cs, change the
called function for damping:
1 2
cameraOffset = VirtualCamera.ImprovedDetachedFollowTargetDamp( // Original is DetachedFollowTargetDamp cameraOffset, new Vector3(m_XDamping, m_YDamping, m_ZDamping), deltaTime);
You could also try other components, not just
FramingTransposer here.
With the default tolerance=0.05, the result is shown
below.
Camera jitters disappear. Note that the general fps is quite high
(around 400~500). This is because our scene is quite simple, containing
only a cube and a camera. In order to simulate a more real runtime game
situation, I place 20k cubes in the scene and now the fps is around 30,
but still unstable.
Below is the result when using the raw damping algorithm.
Camera jitters more severely due to a generally lower FPS. What about
using the improved damping algorithm? Here is result with
tolerance=0.05.
Just as expected, camera jitters do not show up. Let's try different
tolerances. How will a small tolerance help
alleviate jitters? Below is the result with
tolerance=0.01.
Camera jitters occur again! This suggests that an excessively small
value cannot fully filter out actions that can lead to camera jitters.
Let's try our final experiment with tolerance=0.1.
Camera jitters disappear, but the camera motion seems a little stiff.
These experiments show that an appropriate value of
tolerance to ensure the smoothness and robustness of the
camera.
Solution 2: adding low-pass
filter
Our improved samping perfectly solves camera jitters under unstable
fps, but it looks very stiff when it reaches the boundary of max damping
distance. Can we make it more realistic so that the object won't just
look stolid? Yes of course, we can add low-pass filter, or moving
average to our improved damping to achieve more smooth results.
Recall the algorithm of the improved damping: if , we just set to .
Instead of hard setting to , we introduce , the smoothed version
of the original delta residual . If holds, we calculate as an average of
and :
which can be iterated through a recursive form:
Note that gets
updated if and only if holds,
i.e., when the camera lies in the unstable area. The
use of is similar to
low-pass filters in the sense that they all filter out high-frequency
signals.
Below is s sample code implementation in file
Predictor.cs:
Let's try it out! With damping time and , we can achieve the
following damping result with low-pass filter:
Now the camera looks much more smooth and, flexible. What about
trying a smaller damp time, say, ? Here is the result:
The result is ok but sometimes it's still jittering. It is because a
smaller leads to a larger and thus a larger chance to
cause jitters. To solve this issue, we can set a larger tolerance , or we can have a smaller
. We adopt a of and see how it performs.
The camera now becomes smooth again.
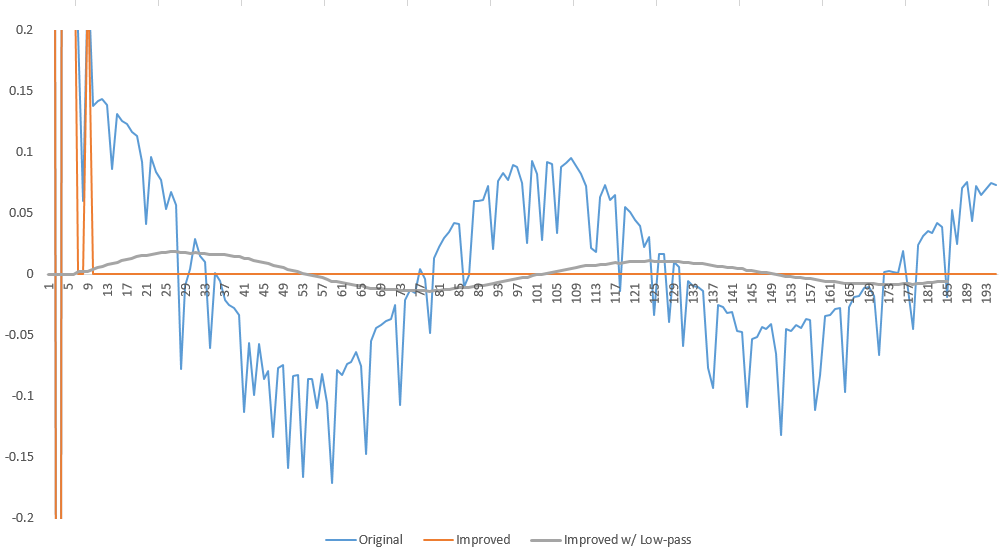
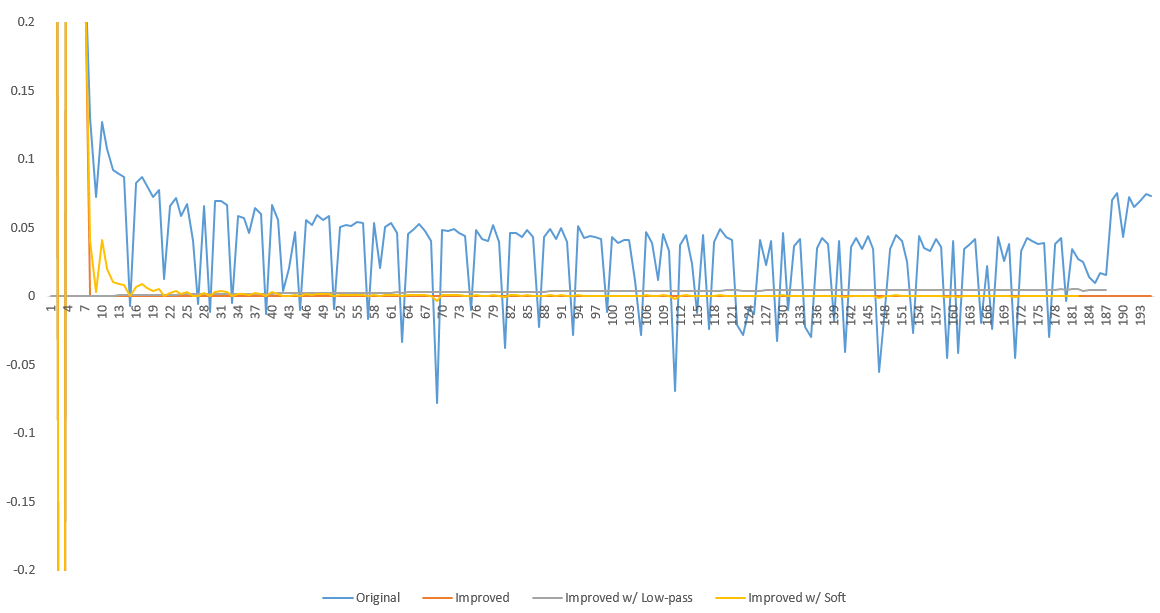
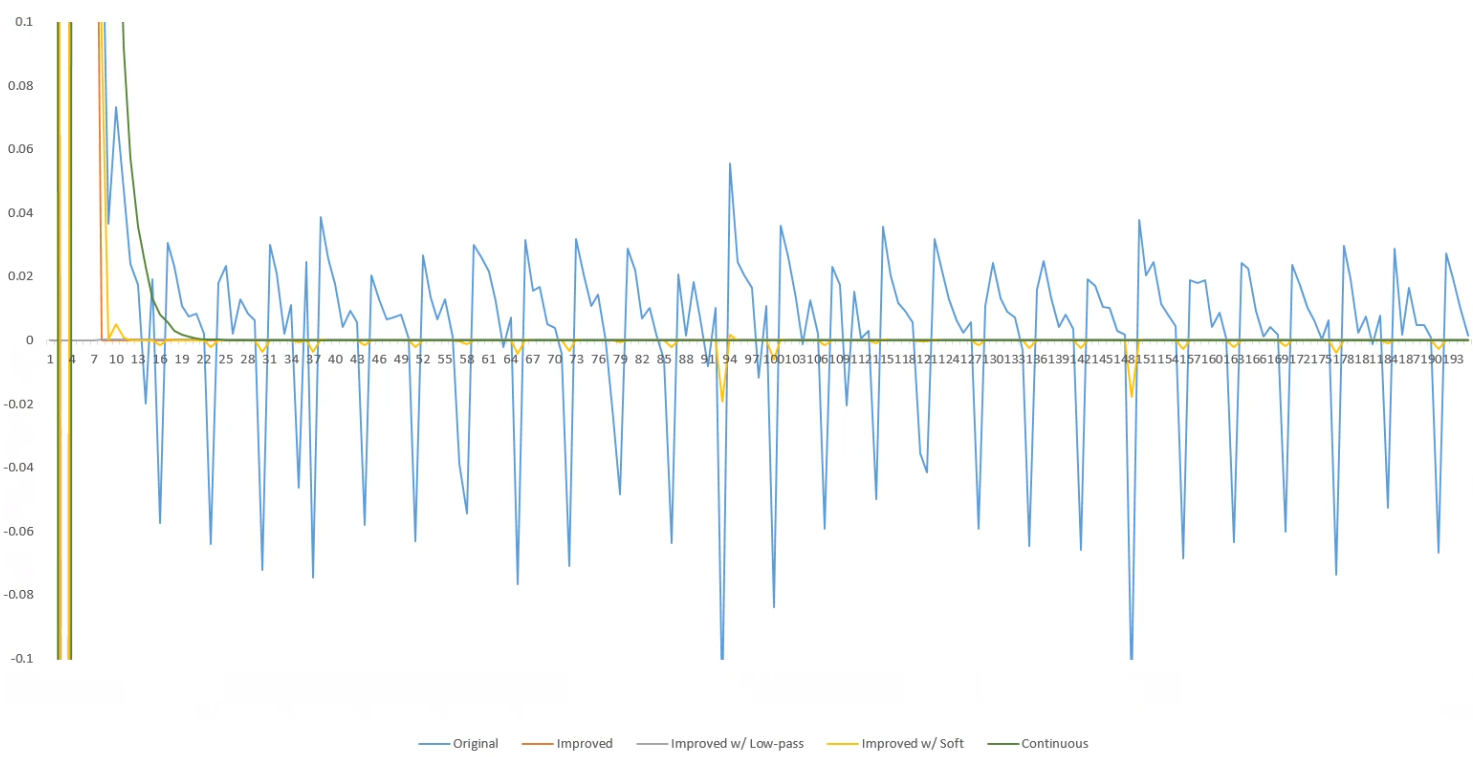
We can measure this sort of instability more quantitatively. Below is
a graph plotting
during five seconds of camera trace with damp time . The original curve (in blue)
oscillates over time due to an instability of fps. The improved damping
method eliminates all the oscillation and makes the curve absolutely
plain. Empowered by low-pass filter, the curve becomes smooth without
loss of stability.
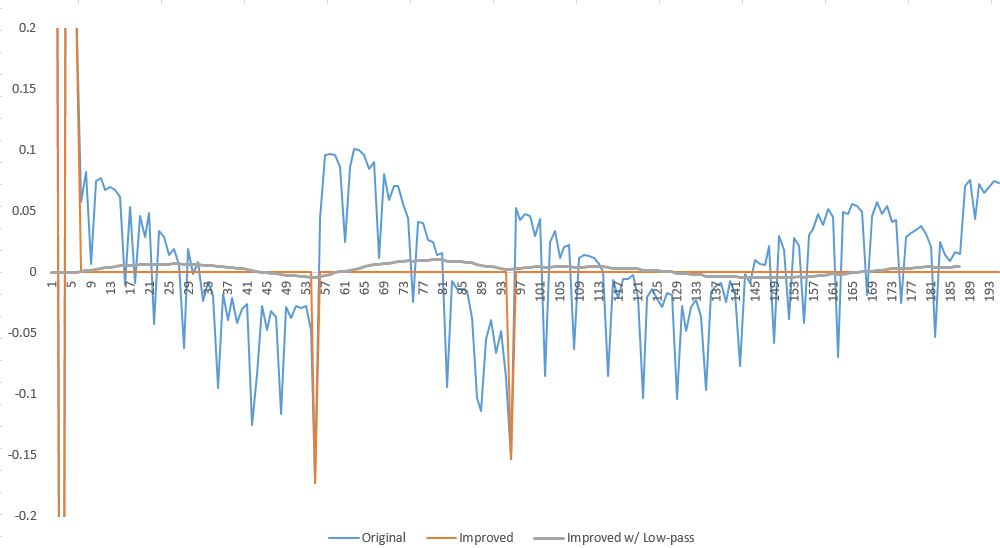
Below is the graph with damp time . As can be seen, even with improved
damping, the camera still has a chance to vibrate, and the original
curve, oscillates much more intensely than with . Employing the low-pass filter
gives a much smoother and stable camera motion curve, as expected.
Speaking of this, why can't we just soften our
improved damping assignment to where is a function of
parameterized by .
Assume
and , we first calculate ;
then calculate ;
last, we have .
For , we obtain . is a parameter controlling how fast the
value of grows from
to . The larger is, the larger mass will be
concentrated on the
side.
Below is the result with
and :
Not bad! The soft version of improved damping really makes the camere
smoother and less stiff than the vanilla improved damping algorithm. The
follow plot also shows that with soft parameterization, the camera
trajectory is much more natural with neglectable amount of
oscillation.
We also compare it to different and . Beolow is the result with and .
A larger makes the camera more
stiff, but is still better than the original improved damping
algorithm.
Below is the result with
and .
is less effective as the
magnitude of attenuation it applies to is not enough to compensate
for the osciallation the unstable fps brings about.
Let's try another damp time. The result with and shows as follows.
When , the oscillation is
more severe, as we've already stated above. What about ?
Better, but still not sufficient to mitigate the oscillation. Let's
try .
Almost perfect. We can conclude that a smaller needs a larger to offset the intense jitters resulted
from unstable fps. Besides, you can combine the soft improved damping
method and low-pass filters to achieve a smoother transition.
Solution 3: continuous
residual
Okay, let's forget all aforementioned solutions and revisit our
residual update formula at the very beginning:
Reformulate thie equation to the following form:
where is the speed of the
camera's follow target, and is a more generalized form of the damping function .
Theoretically, it can represent any function of interest.
Now, regarding as a function
with respect to , we can seek to
obtain its derivative:
We use the equality
because when you plug
into , you will get , implying .
What about derivatives with higher orders? We can calculate the
second-order derivative as follows:
It is a nice form which bridges the first-order derivative and the second-order derivative
. In fact, for any
-th order derivative, it can be
recursively calculated as:
Having all these derivatives, we can then expand using Taylor series and
calculate the difference to :
Note that if we are still choosing as out
damping function , the
derivative of it with respect to will be and the value at zero will be .
In practice, we first decide how many terms in the coefficient term
should be taken in, and then sum them up and multiply with the velocity
term, the result of which is denoted by . The residual at the current
frame, can be readily computed as . To save
computation, we can first cache
up to a threshold, say , and
then using the formula of geometric series to efficiently compute the
coefficient sum.
To estimate its error, we use the Lagrange remainder:
Decompose it:
where
and as we assumed. We can
see that the error is asymptotically negligible with respect to , especially when is small.
Recall that
where and
is the damp time. If is large, say 0.5 or even 1.0, the
value of will be
somewhat small so that a decent precision can be reached within few
steps of expansion, i.e., a small
say 2 or 3 could satisfy camera stability. However, if is small, say 0.2 or 0.1 or even
smaller, the value of
would grow larger, and then a larger might be needed to reach our expected
precision. This is in accordance with our observation that a smaller
generally leads to a more
unstable camera trajectory. We will show this soon.
Let's first try and . Recall that is the maximum order of derivatives we
use to approximate the residual difference. means that we only use in the coefficient term. Here is
the result:
Looks nice! What about setting ?
Not much difference, but a little bit smoother. Let's try respectively with and . First comes .
It's okay but it seems too fast when the cube comes back to
stillness. How about ?
Now everything gets worked! Next, let's set smaller, which generally won't be used
in actual gameplay but as a test it's worth a try. We set and try different to see how they influence our camera
trajectory.
Here is the result with :
Okay... a total mess. Try :
Unfortunately, the cube always stays behind the camera. Now :
Forget about it ... Let's try :
Things are getting better! At least it does not shake anymore and
begins to stay at the right position. I bet is better:
It's close! Last, we try :
Finally, the camera disposes everything well. As we can see from the
process, a small requires a large
to reach the minimum acceptable
precision. I hope you never have the chance to use such a small , and if it happens, cache enough orders
of derivatives or it would be prohibitively expensive to compute at
runtime.
To further understand why this method solves the jittering issue, we
take a deeper look at the expression of derived above.
This is an ODE and we solve it out (proof left to the readers):
Here I've expanded as . We cannot
directly use this explicit expression to calculate because there is no
correct time stamp when game is running. What we only have
is the previous frame's residual and the elapsed time at this frame
. And as the velocity may change over time, a closed-form of
cannor serve our purpose well.
We can only incrementally calculate camera residuals at each frame based
on what we currently have.
is a monotonic increasing
function, and of course, it's continuous. The continuity ensures that
the camera trajectory is always smooth and never jitters, if fps is
sufficiently high (over one thousand I suppose?).
For the original discrete residual, its velocity is:
where is from
Lagrange's Mean Value Theorem. Note that I add a tilde symbol over to distinguish it from the one from the
continuos version above.
This is another ODE. We can solve it out (proof left to the
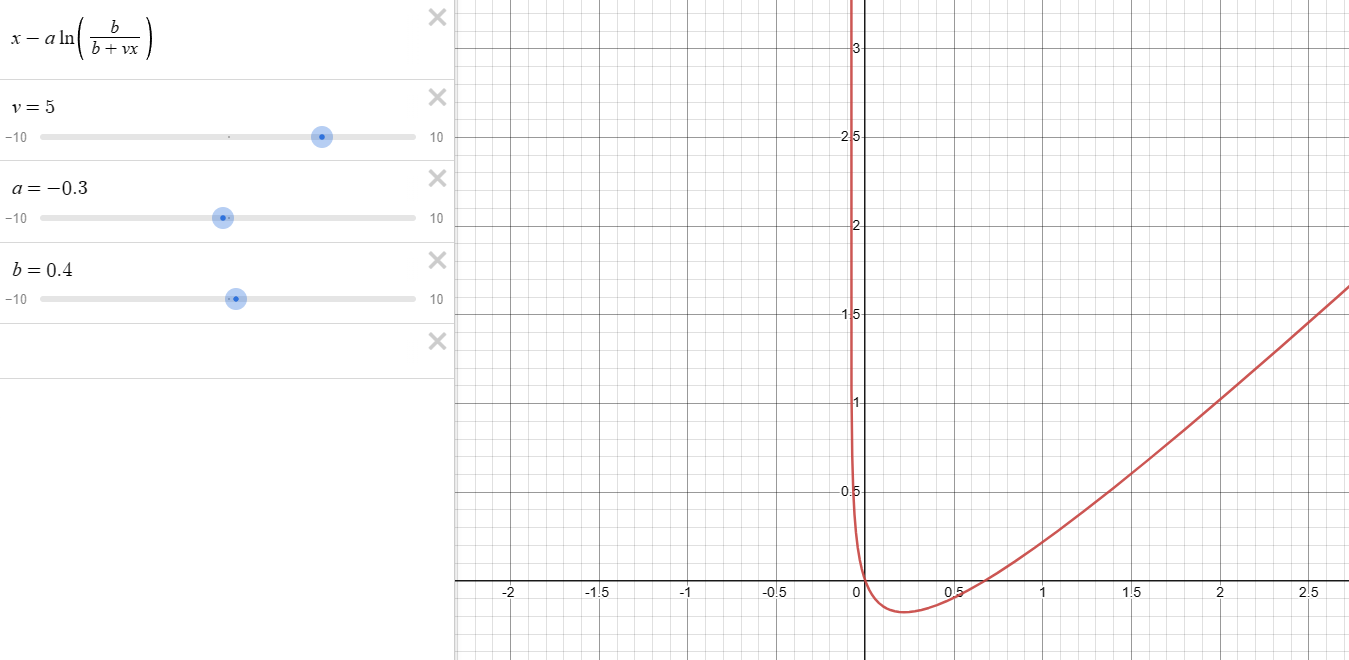
readers):
Note that we solve the ODE with respect , the increment time rather than
the absolute time . So, we
introduce an initial value to control what the
initial value of residual is at this frame, is now the elapsed time for this frame
satisfying and .
The following graph shows that how the function changes with
different and . It can be
noticed that this function is very sensitive to the input , the elapsed time at this frame. A
small change of the input would significantly change the sign of , thus causing camera jitters.
We also notice that a smaller ,
derived from a smaller , pushes
the function leftwards, which also makes it more vulnerable to
inputs.
Below is a comparison between five damping algorithms introduced in
this article, including the original damping. Damp time is set to 0.2. We observe significant
stability improvement when using any of the four proposed damping
algorithms. You should be careful when choosing the most appropriate
algorithm because the situation on which you intend to use damping. How
unstable is your fps? What is the damp time ? How is the tracked object moving? You
should experiment with these algorithms and choose the one that best
suits your needs.