Averaging rotations (i.e., quaternions) may not be as simple as you expected. Based on the result of this work, this post goes into the details why a simple weighted average of quaternions does not work and how to implement the real interpolation between quaternions. Part of this post is inspired from Quaternion Weighted Average. Thank Daniel.
Method #1: Simple Weighted Average of Quaternions
Problem Definition
Before I go into the details of today's topic, let me first give a relatively formal definition to the problem I will discuss in the later sections.
(Weighted Average of Rotations) Given a set of rotations (quaternions)
and their associated weights where and , we would like to calculate the weighted average rotation such that
(1)is continuous at each with fixed ;
(2)is continuous at each with fixed .
This definition points out for a desired weighted average of rotations, we would like it to maintain robust to slight changes of any of the sub-rotations and to slight changes of weights. As we will see soon, however, most popular solutions do not adhere to these two properties, and thus creating the so-called jump rotation phenomenon.
N-lerp: Normalized Arithmetic Average
N-lerp is short for Normalized Interpolation. It's a widely-used,
simple quaterion interpolation strategy to blend multiple quaternions.
Basically, an N-lerped quaternion
The norm at the denominator is necessary to make sure
To see what's wrong with the simple N-lerp method, let's look at simple case.
Assume we are interpolating two quaternions, one is a fixed identity
quaternion, i.e.,
As a result, the final interpolated quaternion will be:
The pesudo code is given as follows:
1 | FQuat WeightedQuat = Weights[0] * Cameras[0]->GetActorQuat() + Weights[1] * Cameras[1]->GetActorQuat();; |
The right panel shows the rotation of the second quaternion, which
represents a camera always looking at the cube from the player's view. I
also print
We can see that, when the rotation angle is in
The following figure shows what is means to say the other half space of the plane.
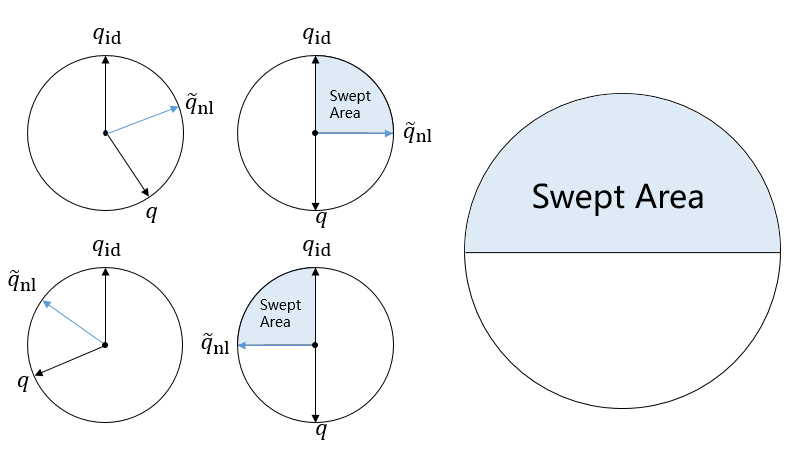
When rotation angle is in
You may ask, why does the rotation axis have to be flipped? Can you
just maintain the rotation axis and let the rotation angle span
In fact, we can take a closer look at the the we compute
Assume
Then we have the following derivations:
The final quaternion
This can be easily extended to multiple quaternions. More quaternions there are, more prone to slight changes the average quaternion will be.
S-lerp: Spherical Average
If you are familiar with spherical interpolation (S-lerp), you may wonder if it's possible to maintain continuity using S-lerp. Unfortunately, the jump rotation issue will still arise even if you use S-lerp.
Let's use the same example of N-lerp. The first quaternion is
This result is equivalent to N-lerp, which is not surprising as S-lerp is still manipulating raw quaternions.
We can use the following figure to illustrate why N-lerp and S-lerp are not working in our trivial case:
The angle of the result quaternion
Discontinuity of N-lerp
In this section, I will go deeper into the mathematical details of the jump rotation problem, formally proving that simple weighted average with either N-lerp or S-lerp will sometimes (and when) cause the jump rotation problem. This can help us determine in which situations you can safely use N-lerp or S-lerp to average quaternions.
Theorem 1: Quaternion Discontinuity of N-lerp
First, we present a lemma, and it will be used to introduce our theorem.
Lemma 1.1: Given two quaternions
and their weights , their N-lerp average quaternion , which is a function of , is discontinuous at rotation angle when , assuming the range angle is where also represents zero rotation.
To prove this lemma, we first rewrite the quaternions as
and its norm is:
which gives the explicit expression of
If
with any given
We only need to compare to the real part of
Taking square on both sides and simplifying the equation, we have:
implying that the equality holds only when
In other words, if
We can actually estimate the difference of angle between
where
This means that the magnitude of rotation jump is related to the
cosine of
Theorem 1: Given quaternions
and their where and , the N-lerp average quaternion , which is a function of , has discontinuous at angle when the rotation angle of quaternion is not , assuming the range angle is where also represents zero rotation.
This can be seen by decomposing
Applying Lemma 1.1, Theorem 1 is
obvious.
Theorem 1 tells us that the N-lerp style average
quaternion Theorem 1 so
that there will be less chance for
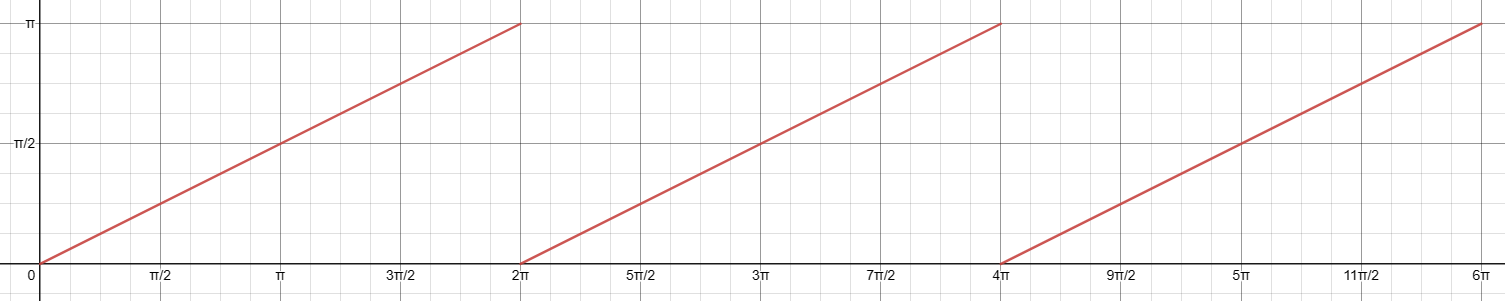
The following figure show us how Theorem 1 performs in
practice. Note that in Unreal Engine, the rotation angle range is
Theorem 2: Weight Discontinuity of N-lerp
Under certain conditions, the average quaternion derived from N-lerp also suffers from discontinuity at particular weight values. We first present the following lemma.
Lemma 2.1: Given two quaternions
and their weights , their N-lerp average quaternion , which is function of , is discontinuous at if:
(1)and where ;
(2)and where or .
First we can express
and its norm is:
Therefore the explicit form of
Considering the real part of
We then discuss two cases whether or not
When
When
Let's expand
which implies:
Through the first and the second equations, we have solutions
Substituting
The proof for the second condition is quite similar. Suppose
where
Since
Theorem 2: Given quaternions
and their weights where and , the N-lerp average quaternion , which is function of , is discontinuous at if:
(1)and where ;
(2)and where or .
where the lastquaternions form a new quaternion .
This theorem is obvious when we rewrite
The following figure shows that even if sub-quaternions are fixed, changing their weights could also drastically change the final average quaternion, resulting in the jump rotation issue.
Method #2: Matrix Decomposition for the Largest Eigen-value
The jump rotation problem is rooted in the double cover property of
quaternions, i.e.,
We would like a way, serving as a 1:1 mapping to the rotation group, to help us disambiguate from the double cover issue. Matrix, does serve this purpose!
Special Orthogonal Matrix Is 1:1 Mapping to Rotation
First according to Wikipedia, we
call the subgroup of orthogonal matrices with determinant +1 the
special orthogonal group, denoted by
Next, we prove that the group of quaternions is 2:1 mapping to
This is a rotation around vector
We can comprehend quaternions as the process of rotation, whereas conceive matrices as the result of rotation, represented as the basis after rotation.
Problem Reformulation
Till now, the problem becomes: given a set of rotation matrices and their associated weights, how do we compute the average rotation? We can first give a particular definition of average: the average rotation should minimize a weighted sum of the squared Frobenius norms of the rotation matrices. This definition can be formulated as follows:
Based on this definition, we can derive a very neat closed form of
In the next subsection, I will go into the details of deriving
Solving the Problem
Let's first expand
In order to expand
We can then expand
From this third equality, we know that
From the definition of
To compute
which means
Combining all of these, we have:
Finally, the problem reduces to:
and this corresponds to finding the eigenvector of the largest
eigenvalue of
We can further examine the error quaternion between
This implies that the average quaternion that minimizes the weighted
sum of Frobenius norms actually minimizes the weighted sum of squared
sines of half angles, which is quite intuitive to interpret
Pseudo Code
There are plenty of algorithms to compute the largest eigenvalue of a symmetric matrix, but the most commonly used one is power iteration, as it's simple to implement and fast in most cases.
I won't go into the details of power iteration. You can easily understand this algorithm with basic linear algebra knowledge.
Giving a set of quaternions
1 | FQuat AverageQuats(TArray<FQuat>& Quats, TArray<float>& Weights) |
Discontinuity of M-lerp
However, M-lerp does not provide continuity on
Assume
Optimization goal:
Then calculate its eigenvalues:
There are three different eigenvalues:
The largest eigenvalue is
We can only focus on when
We can respectively take limits for both
Since the length of
This means the result quaternion is not continuous at
Theorem 3: Quaternion Discontinuity of M-lerp
Theorem 4: Weight Discontinuity of M-lerp
Why Is M-lerp Working
NOTE: When reviewing this section, I find the proofs of Theorem 3 and Theorem 4 are NOT correct. Therefore, M-lerp does NOT ensure continuity for either each rotation or each weight. The incorrect proofs are still left below for reference.
Using the same notion of continuity, we conclude that the matrix decomposition method quite well maintains the property of continuity. This can be formalized as the following theorems.
Theorem 3:
Quaternion Continuity of M-lerp
Without loss of generality, we view
For ease of illustration, we rewrite
We first show that the mapping from a real symmetric matrix
Lemma 3.1: The mapping from a real symmetric matrix
to its largest eigenvalue is continuous.
We begin with that fact that the spectral norm of
On the other hand, we know that the spectral norm map is continuous,
and thus the map
Then, we prove the following lemma.
Lemma 3.2: The mapping from a unit vector
to matrix is continuous regarding the Frobenius norm.
Assume
As long as
Corollary 3.1: The mapping from a unit vector
to matrix is continuous regarding the Frobenius norm, where are fixed coefficients and are fixed unit vectors.
Lemma 3.3: The mapping from a unit vector
to the eigenvector of the largest eigenvalue of is continuous. That is, is continuous, where .
In fact, the matrix
This means the eigenvector
and any vector parallel to
Theorem 3: The mapping from a quaternion
(4-dimensional unit vector) to the eigenvector of the largest eigenvalue of matrix is continuous.
For ease of elaboration, we rewrite Lemma 3.1 and Corollary 3.1 that:
where
where
Since Lemma 3.2,
there exists a matrix
On the other hand, we use a rotation matrix
It's orthogonal and skew-symmetric:
Substituting
Rearranging the terms gives us:
According to this expression, we know that
We can compute the Frobenius norm of
Remarks: It seems that this is a special case of a more general theorem. Please refer to Kato, T., Perturbation theory for linear operators. Springer-Verlag, 1976. I am not 100% sure about the correctness of the proof. This continuity may stem from the floating number error induced in the course of numerical calculation.
The following figure shows how M-lerp works to blend three
sub-quaternions. Although you can observe that sometimes the camera
rotates fast, it's generally continuous as sub-quaternions change
without jump rotation. We can say that the averaged rotation is
Theorem 4: Weight
Continuity of M-lerp
In this subsection, we will show that the mapping of
Theorem 4: The mapping from a real value
to the eigenvector of the largest eigenvalue of matrix is continuous.
We rewrite
which is constant over Lemma 3.1,
we know that:
where
where
Since
Then we can follow the same proof process of Theorem 3
to derive the conclusion.
The following figure shows that unlike N-lerp, the averaged quaternion still maintains continuity as the weights change.
Method #3: Quaternion Flipping
The most common implementation of averaing rotations might be to
maintain a running average
1 | FQuat RunningQuat = FQuat::Zero(); |
In this section, I will show that this method also introduces discontinuity in most cases, but it indeed grants continuity under certain conditions. If these conditions are satisfied in your application, you can safely use this approach to average rotations. We call this method F-lerp.
Theorem 5: Conditional Continuity of F-lerp
We first present a special case of F-lerp to give you an intuitive insight of how F-lerp ensures continuity.
Theorem 5: Given
quaternions and their weights with , their F-lerp average rotation is continuous about at for some . All weights and other quaternions are fixed.
Proof is quite simple. assume the unnormalized quaternion in the
Theorem 5 tells us that if all quaternions except the
variable one are fixed, the average rotation derived from F-lerp is
continuous about this rotation at Theorem 1, not continuous for N-lerp.
The following figure shows three rotations that are close enough are averaged without any discontinuity.
Theorem 5 rigorously assumes only one quaternion is
variable. The following Corollary 5.1 presents a more
general case where all quaternions are variable and the average
quaternion is continuous about all of them, if satisfying certain
conditions:
Corollary 5.1: Given
quaternions and their weights with . All weights are fixed. Assume for some the quaternion lies in the neighborhood of and all other quaternions are not near . If (1) , and (2) or , then the F-lerp average rotation is continuous at where and all others are not.
Corollary 5.1 tells us that if one quaternion is
crossing degree
Let's proof it.
Let
The
When
When
When
You can similarly prove that if
We have the following Corollary 5.2 to slightly relax
the first condition of Corollary 5.1:
Corollary 5.2: Given
quaternions and their weights with . All weights are fixed. Assume for some the quaternion lies in the neighborhood of and all other quaternions are not near . The F-lerp average rotation is continuous at where and all others are not, if the following conditions are satisfied:
(1)can be partitioned into two sets and and the two sets satisfy:
(1.1),
(1.2).
(1.3).
(2)or , and or .
The second condition says that the cosines of quaternions in the same set have the same sign, but the consines of quaternions from different sets are different.
Corollary 5.2 can be proved by progressively considering
Corollary 5.2 tells us that if all quaternions can be
divided into two sets where (1) the intra-dot product is positive (
quaternions in the same set are close enough), (2) the inter-dot product
is negative (quaternions from different sets are far away from each
other), and (3) their rotation angles can also be separated by their
cosine values, F-lerp then ensures continuity.
If you have a set of quaternions that are very close to each other, or two sets of quaternions that are separatable, you can use F-lerp to smoothly average quaternions.
Theorem 6: Discontinuity of F-lerp
In this section, I will show you that F-lerp also introduces
discontinuities while eliminating some discontinuities brought by
N-lerp. We have the following Theorem 6.
Theorem 6: Given
quaternions and their associated weights with , the result of F-lerp has discontinuities if satisfying (1) , and (2) there exists a neighborhood of that makes the dot product change its sign, assuming and all are fixed and is variable. Here is the quaternion derived from the -th iteration of the F-lerp algorithm.
The intuition behind Theorem 6 is that as
The key point is to find
For example, when
which implies that
We can in fact estimate the difference between the quaternion where the dot product is positive and the quaternion where the dot product is negative.
Suppose the possible discontinuous quaternion is Theorem 5. Besides, we assume in the neighborhood of
The positive result of F-lerp is (assume
Similarly, the negative result of F-lerp is:
It is obvious that taking limits for both
and
The denominator seems a little crazy, but fortunately we can simplify
it. Note that
Then we have:
Next we expand the denominator of
Therefore, we can rewrite
The difference between
We can use a simple example to illustrate this. Suppose
Then, we can easily calculate
It is clear that
The following figure illustrates that discontinuity does not appear
at
The question, however, arises that any quaternion
The root of it is
Remarks: F-lerp can be very helpful if
you have a set of quaternions that are very close or two sets of
quaternions that are separatable, but the risk is the
result can be prone to discontinuities that are not Theorem 6. If your quaternions are all around F-lerp can be a
very good choice -- it's smooth, fast, and will not trigger
discontinuity.
Method #4: Smoothing the Discontinuity
C-lerp: Circular Mean as a Way of Average
Okay let's now forget about everything and think the very first
question: why jump rotation happens? The answer is the illness
of angle representation. The angle representation in game
engine is
What about transforming the trivial angle representation
into some other representation that is continuous regarding the input
angle? Trigonometric functions, particularly cosine and sine functions,
as we all know, serve this purpose quite well, since
Therefore, given a set of angles, we can first map them to the unit circle, i.e., converting from polar coordinates to Cartesian coordinates, compute the arithmetic mean of these points, and them map the averaged point back to the angle representation. This will be the final average angle we want.
More formally, assume
If each angle
This method is called C-lerp, short for circular interpolation, directly from the concept of Circular Mean.
We can write the pseudo code like:
1 | float SumSinYaw = 0.f, SumCosYaw = 0.f; |
The following figure gives two examples of how C-lerp works:
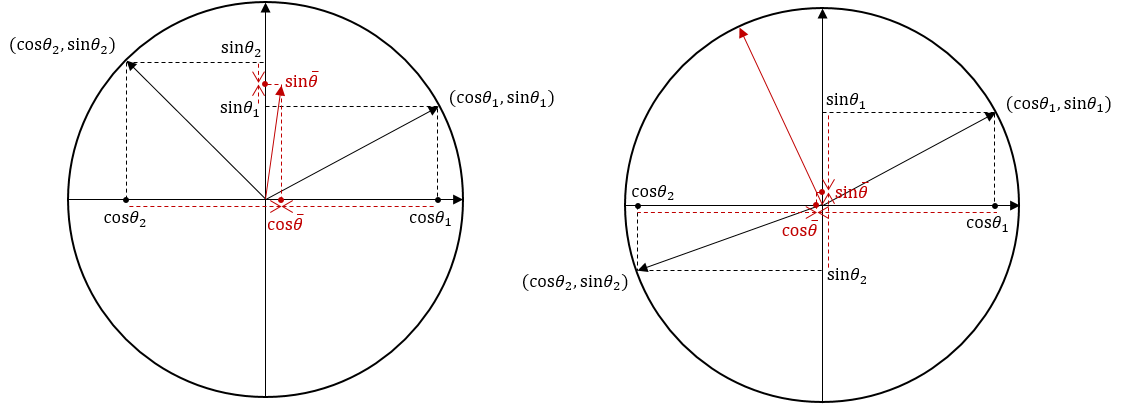
First, two angles
Looks perfect, right? However, unfortunately vanilla C-lerp does NOT
ensure continuity. As a simple example, take
It is obvious that
The following figure shows this discontinuity.
Albeit discontinuous at some points, C-lerp can replace L-lerp and F-lerp in most cases as there is less chance to trigger such discontinuity.
SC-lerp: Smoothed C-lerp
How to mitigate this sort of discontinuity caused by zero divided by
zero? The most intuitive solution is to add a small positive number
You can verify that
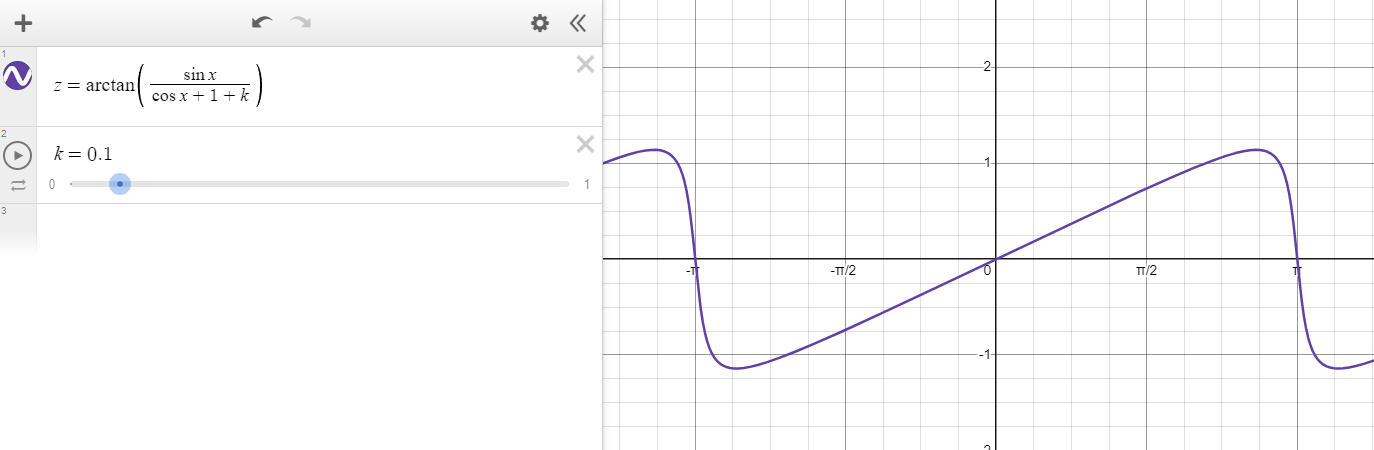
and here is the result:
Now the rotation becomes smooth at
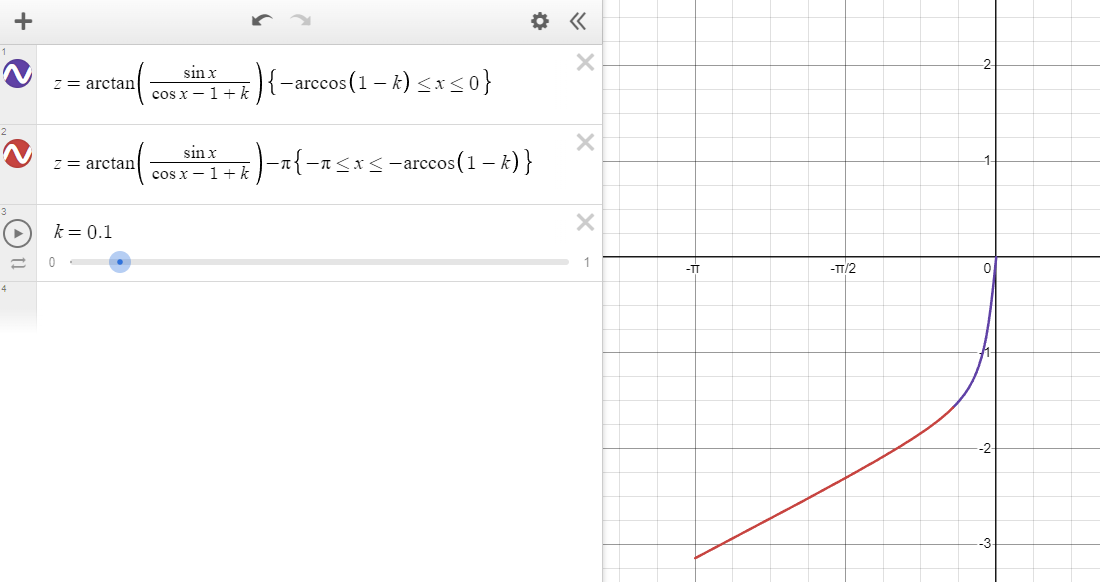
Note that we cannot simply expand
but when
Taking limits for both equations:
meaning that
The following figure shows its continuity on
You can tweak the parameter
Theorem 7: Continuity and Discontinuity of SC-lerp
In this secion, I present Theorem 7 to show when SC-lerp
is continuous and discontinuous.
Theorem 7: Given
angles where and the associated non-negative weights , the SC-lerped average angle is defined as , where . Let and . Then:
is continuous about each angle on domain if any of the following conditions is met:
(1)holds on .
(2)holds on .
(3) There existssuch that and .
(4) There existssuch that and and .
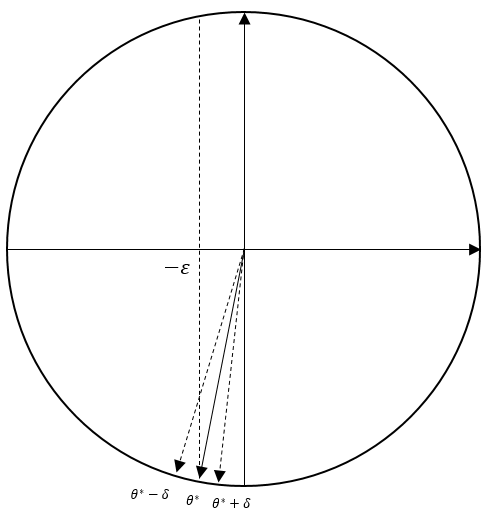
is discontinuous at if there exists such that and and .
Suppose
where
Case 1
If
Case 2
If
Case 2.1
If
Case 2.2
If
Case 2.3
There exists
Case 3
There exists
Case 3.1
Assume when
If we assume
Case 3.2
If
Case 4
There exists
Case 4.1
If
Case 4.2
If
Case 4.3
To be short,
A decent value of
The next three figures illustrate the results when
Conclusion
In this article, I discussed several methods to average rotations: N-lerp (S-lerp), M-lerp, F-lerp, C-lerp and SC-lerp. I investigated the pros and cons of each method and proposed C-lerp and its improved version SC-lerp to average rotations in a simpler and more efficient way.
In summary, I suggest you:
- Use N-lerp if all sub-rotations are close enough
and none of them cross from
to (or from to ); - Use F-lerp if all sub-rotations are close enough or can be divided into two sets that are separatable;
- Use M-lerp if you want a smooth and accurate result;
- Use SC-lerp if you want a smooth and accurate result that is efficient to compute and the Euler angle interpolation does not make a big difference.
There might be mistakes in this article. Feel free to contact me if you find any / want to discuss with me / have further questions.
References
Averaging
Quaternions
Quaternion
Weighted Average
Perturbation
Theory for Linear Operators
Circular
Mean